目标检测是自动驾驶技术的重要内容,确保上路安全,需要能够精准地检测出路面上所有目标。
这不仅要求汽车感知系统在正常的外界环境工作正常,对于极端恶劣的天气,比如下雪天,也能运行正常。
下图是在自动驾驶系统中,环境变化带来的挑战,雨、雪、雾,还有火灾现场。
随着技术的进步,大量目标检测技术被提出,不断涌出的标着state-of-the-art标签的最先进的算法能够抵御复杂的路况吗?
今天arXiv新出的论文Benchmarking Robustness in Object Detection: Autonomous Driving when Winter is Coming,来自德国图宾根大学和马普所的研究人员,模拟了多个不同环境、成像状况等图像被污损的场景,测评了目前最先进的目标检测。
结果不出所料,图像被污损后,所有算法的检测精度都大幅下降。
下图是一个例子:
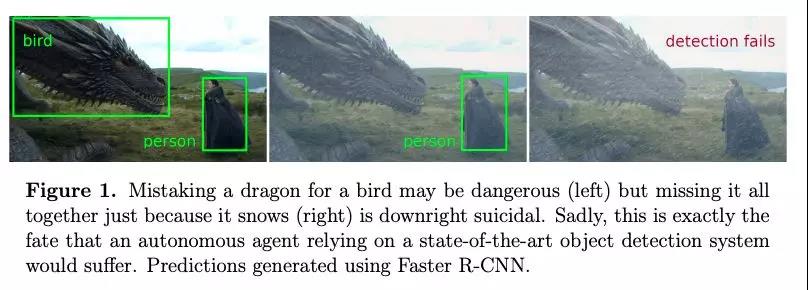
使用Faster R-CNN算法,上图中左子图把一条龙检测为鸟(现实中不会出现龙。。。作者只是举个例子),更糟糕的是,当图像被“下雪”后,竟然两个目标都检测不出了。
这就有点过分了,因为“下雪”后,人眼可是能轻而易举看出画面中的目标的。
鲁棒目标检测基准测试
作者们提出新的目标检测基准测试Robust Detection Benchmark,在现有数据集基础上,制作了三个大型图像被污损后的目标检测数据集:Pascal-C, Coco-C , Cityscapes-C。
下图为作者在前人启发下模拟的 15 种图像被污损的情形,这15种情况可以分为 noise, blur, digital, weather 4 组,而每一种情况,都模拟出了5个不同的严重等级(由轻微到严重)。
算法评测
作者评估了多个目标检测算法:
Faster R-CNN [Ren et al., 2015],
Mask R-CNN [He et al.,2017],
Cascade R-CNN [Cai and Vasconcelos, 2018],
Cascade Mask R-CNN [Chen et al., 2019a],
RetinaNet [Lin et al., 2017a],
Hybrid Task Cascade [Chen et al., 2019a]。
其中有2个算法,是上个月才被提出的state-of-the-art,可谓代表目标检测领域的顶尖水平。
文中使用的评价指标不再赘述,我们来看看结果吧。
下图中clean代码原始数据集,corrupted为被污损后的数据集,relative代表精度下降的幅度。
可见,最少下降31.1%,最大下降64.7%!
下图为使用Faster RCNN算法随着污损严重程度变化检测结果实验的折线图,可见精度是一致性的下降。
然后作者使用Faster RCNN在不同骨干网下进行了实验,发现容量更大的骨干网表现出一致性的精度更好。如下图:
神奇的风格迁移
如何提高模型抗图像污损的鲁棒性?
作者实验了使用图像风格化来增广训练数据,使用的风格化方法来自:AdaIN [Huang and Belongie, 2017](已开源)。
风格化图像示例:
是不是看起来跟现实环境差别很大,不过没关系,我们要的是疗效!
如下表格:
图中combined一行即为将原始数据和风格化后数据放在一起训练的结果。使用Faster RCNN实验。
